Salida actual 1. Introducción
1.1 Generalidades
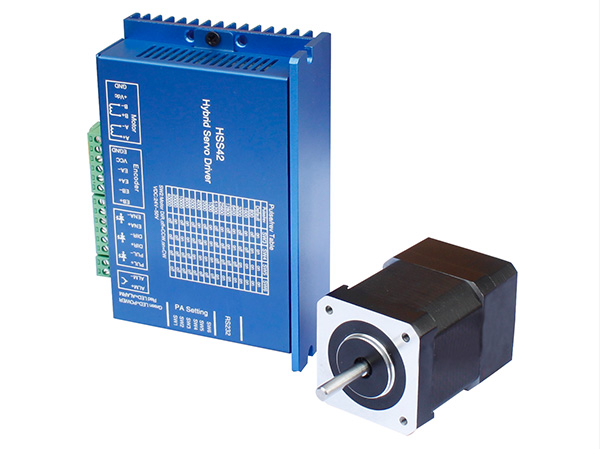
3hss2260 es un servo híbrido de alta potencia. Es adecuado para 86 (nema34) y 110 (nema42) Motores de tres fases. En comparación con el controlador de paso de bucle abierto tradicional, el controlador de servo de paso evita completamente el problema de que el motor de paso está fuera de paso, y la amplitud de caída del par de alta velocidad es mucho menor que el controlador de paso de bucle abierto, lo que mejora en gran medida el rendimiento y El par del motor de alta velocidad. La corriente de conducción puede controlarse automáticamente de acuerdo con la carga, lo que puede reducir eficazmente el aumento de temperatura del motor y prolongar la vida útil del motor. La posición incorporada y la salida de la señal de alarma son convenientes para que el ordenador superior supervise el Estado de funcionamiento del motor. Función de alarma de error de sobreposición para garantizar el funcionamiento seguro del equipo. Es el reemplazo ideal y la actualización del controlador de bucle abierto tradicional, y también tiene algunas funciones del sistema AC servo, el precio es sólo la mitad del sistema AC.
1.2 características
★ DSP de 32 bits y tecnología de control de bucle cerrado vectorial
★ Sin perder el paso, alta precisión de posicionamiento
★ Aumentar el par de salida y la velocidad de trabajo del motor
★ Tecnología de control de corriente variable para suprimir el aumento de temperatura del motor
★ Para adaptarse a diversas condiciones de carga mecánica (incluida la polea de baja rigidez), no es necesario ajustar los parámetros de ganancia
★ El Movimiento es estable y fiable, la vibración es pequeña, el rendimiento de aceleración y desaceleración se mejora en gran medida
★ Capacidad estática sin vibración de velocidad cero
★ Para servomotores híbridos de tres fases 86 (nema34) y 110 (nema42)
★ Frecuencia máxima de pulso escalonado 200 kHz
★ Micropaso 200 - 65535 pulso / revolución
★ Rango de tensión ac150 - 220V
★ Protección contra sobrecorriente, Sobretensión y Sobretensión
★ Pantalla digital de seis dígitos, fácil de establecer parámetros y monitorear el Estado de funcionamiento del motor
1.3 aplicación
Es adecuado para equipos e instrumentos de automatización que necesitan un gran par, tales como: máquina de grabado, máquina de coser, máquina de pelar hilos, máquina de marcado, máquina de Corte, máquina de composición láser, trazador, máquina de control numérico, equipo de montaje automático, etc. Buena energía neutral, bajo ruido y alta velocidad en el equipo.
2. Indicadores técnicos
Tensión de entrada | Ac150 ~ 220V (generalmente 220VAC) |
Salida actual | Pico 6.0a (variable de corriente basada en la carga) |
Entrada de corriente lógica | 7 ~ 20 ma |
Frecuencia | 0 ~ 200 kHz |
Motor adecuado | Servomotores híbridos nema34 y nema42 de tres fases |
Resolución del codificador | 1000 |
Resistencia al aislamiento | = 500mω |
2.2 Índice ambiental
Método de refrigeración | Enfriamiento natural o forzado por aire |
Entorno de trabajo | Evite el polvo, la niebla de aceite y los gases corrosivos |
Temperatura de funcionamiento | 0 ~ 50℃ |
Humedad | Humedad relativa 40 ~ 90% |
Vibración | Velocidad máxima 5,9 M / S 2 |
Entorno de almacenamiento | - 20℃ ~ 65℃ |
Peso | Unos 1500 G |
2.3 especificaciones mecánicas

3. Interfaz de Puerto
3.1 puerto de interfaz de potencia 1
Puerto | Simbolismo | Definición | Comentario |
1 | L | Conector de alimentación del motor a 220 AC | |
2 | N | ||
3 | Carolina del Norte | No conectado | |
4 | BR | Resistencia del freno | Frenado externo Conexión de Resistencia Entre BR y P |
5 | P | Tensión de bus DC |
3.2 puerto de interfaz de potencia 2
Puerto | Simbolismo | Definición | Nema34 | Nema42 |
1 | U | Puerto de conexión del motor u | Rojo | Negro |
2 | V | Puerto de conexión del Motor V | Negro | Marrón |
3 | W | Puerto de conexión del motor W | Azul | Azul |
4 | Educación Física | Suelo | Amarillo | Amarillo |
5 | L | Conexión de potencia del controlador A 220VAC | Rango ac150 - 220V | |
6 | N | |||
3.3 puerto de interfaz de señal de control (44 pin DB)
Puerto | Simbolismo | Definición | Comentario |
3 | Poole | Entrada de señal de pulso | |
4 | Poole... | Entrada de señal de pulso | |
5 | Dir | Entrada de señal direccional | |
6 | DIL... | Entrada de señal direccional | |
7 | Limosna | Salida de la señal de alarma | |
8 | Limosna | Salida de la señal de alarma | |
9 | Ofrecer una recompensa | Salida de la señal de posición | |
10 | Pendiente | Salida de la señal de posición | |
11 | ENA | Activar entrada de señal | |
12 | ENA... | Activar entrada de señal | |
23 | Osteoartritis | Salida del codificador | Señales codificadoras a, B y Z Accionamiento diferencial (26ls31) Salida, salida no aislada. Si Sólo hay dos motores a y B Codificador de canales, y luego ignorar Z Canal. |
24 | Osteoartritis | ||
25 | Ob | Salida del codificador B | |
26 | Ob | ||
27 | Oz | Salida Z del codificador | |
28 | Oz... |
29 | CZ | Codificador Z colector de circuito abierto Salida | |
30 | Gnd | Suelo |
3.3.1 puertos de interfaz de salida de señales (pend y Alm)
El circuito de salida de señales PED y Alm adopta el optocoupler Darlington, que se puede conectar con el relé o optocoupler. Tenga en cuenta lo siguiente:
★ Utilice la fuente de alimentación para alimentar el transpondedor o optocoupler. Si la fuente de alimentación está mal conectada, el conductor se quemará.
★ Potencia máxima 25vdc, corriente máxima 50ma.
★ Si se utiliza una carga inductiva como un relé, el diodo debe estar conectado en paralelo con la carga inductiva, y si la polaridad del diodo se invierte, el conductor se dañará.
★ Cuando se enciende, la caída de tensión es de aproximadamente 1 V, que no puede satisfacer el requisito de bajo nivel ttl, por lo que no puede conectarse con la corriente ttl.

3.3.2 puertos de interfaz de entrada de señales (Pul, Dir, ENA)
★ Conexión de señales diferenciales

★ Conexión de ánodo común

★ Conexión de cátodo común

Entrada de señal 5v. Si se introduce una señal de 12v, se requiere una resistencia adicional de 1K ω. Si se introduce una señal de 24 V, se requiere una resistencia adicional de 2 k ω.
3.4 puerto de interfaz de entrada de señal del codificador (DB de 15 Pines)
Puerto | Simbolismo | Definición | Comentario |
1 | EA | Codificador a + input | Si el motor tiene sólo dos a y B Codificador de canales, y luego ignorar Z Canal. |
11 | EA | Codificador a - input | |
2 | Haz de electrones | Codificador B + input | |
12 | Haz de electrones | Codificador B - input | |
7 | Ez | Codificador z + input | |
8 | Ez... | Codificador z - input | |
13 | VCC | + 5 voltios | |
3 | Gnd | Suelo |
3.5 puerto de interfaz de comunicación RS232
Puerto | Simbolismo | Definición |
1 | Carolina del Norte | No conectado |
2 | + 5 voltios | Para hisu externo |
3 | Txd | Puerto de transmisión RS232 |
4 | Gnd | Suelo |
5 | Rxd | Puerto receptor RS232 |
6 | Carolina del Norte | No conectado |
4. Cableado
4.1 diagrama de cableado típico

5. Parámetros
5.1 configuración de parámetros
Contraseña | Definición | Alcance | Valor predeterminado | Comentario |
Pa0 | Pantalla de arranque | 0 ~ 7 | 0 | |
Pa1 | Selección del modo de control | 0 ~ 1 | 1 | 0 - open Ring, 1 = circuito cerrado |
Pa2 | Circuito actual KP | 1000 | Prohibición de modificaciones | |
Pa3 | Bucle actual ki | 200 | Prohibición de modificaciones | |
Pa4 | Bucle de posición KP | 0 ~ 1000 | 300 | |
Pa5 | Anillo de velocidad KP | 0 ~ 1000 | 400 | |
Pa6 | Anillo de velocidad | 0 ~ 300 | 80 |
Pa7 | Configuración de micropasos | 200 ~ 65535 | 4000 | |
Pa8 | Resolución del codificador | 4000 | 1000 líneas (4 veces) | |
Pa9 | Límite de error de posición | 40 ~ 65535 | 1000 | |
Pa10 | Porcentaje actual | 0 ~ 80 | 30 | Unidad: 100 ma |
Pa11 | Corriente de circuito cerrado Porcentaje | 1 ~ 80 | 60 | Unidad: 100 ma |
Pa12 | Selección del tipo de motor | 0-2 | 0 | No hay elección |
Página 13 | Tiempo de filtrado | 0 ~ 1500 | 60 | Unidad: 66,7 μs |
Pa14 | Habilitar nivel | 0 / 1 | 1 | |
Página 15 | Nivel de alerta | 0 / 1 | 0 | |
Página 16 | Selección del modo de pulso | 0 / 1 | 0 | 0 - Pul / Dir 1 - CW / CCW |
Página 17 | Borde del pulso | 0 / 1 | 0 | |
Pa18 | Dirección de rotación del motor | 0 / 1 | 0 | |
Página 19 | Velocidad de trote | 1 ~ 600 | 120 | Unidad: RPM |
Pa20 | Modo de espera | 0 / 1 | 0 | |
Pa21 | Nivel de suspensión | 0 / 1 | 0 | |
Pa22 | Aceleración | 1 ~ 2000 | 200 | Unidad: R / S ^ 2 |
Página 23 | Desaceleración | 1 ~ 2000 | 200 | Unidad: R / S ^ 2 |
5.2 descripción de los parámetros
Contraseña | Definición | Descripción | Alcance |
Pa0 | Pantalla de arranque | Cuando el controlador está encendido La pantalla muestra: ★ 0: error de seguimiento de posición ★ Velocidad del motor ★ Velocidad dada ★ Pulso de retroalimentación ★ Pulso dado ★ Corriente dada ★ Código de error ★ Tensión del bus | 0 ~ 7 |
Pa1 | Selección del modo de control | ★ 0: modo de bucle abierto: recepción Señal sólo de entrada de señal Puerto, el motor está abierto Controlado por el conductor. Corriente del motor Dependiendo del tiempo de espera Corriente (pa10) ★ Modo de circuito cerrado: recepción Ambas señales provienen de la entrada de la señal Puerto y codificador, motor La posición está controlada en circuito cerrado | 0 ~ 1 |
Conductor. La corriente del motor es automática Dependiendo de la carga | |||
Pa2 | Circuito actual KP | Prohibición de modificaciones | |
Pa3 | Bucle actual ki | Prohibición de modificaciones | |
Pa4 | Bucle de posición KP | ★ Cuanto mayor sea el valor establecido, mayor será el valor Ganancia y mayor rigidez, y En las mismas condiciones, un pequeño retraso de posición Condición de pulso de mando de frecuencia. Pero el valor es demasiado grande para causar Sistemas oscilatorios inestables. Valor La configuración depende de la carga. | 0 ~ 1000 |
Pa5 | Anillo de velocidad KP | 0-1000 | |
Pa6 | Anillo de velocidad | 0-300 | |
Pa7 | Configuración de micropasos | 200-65535 | |
Pa8 | Resolución del codificador | ★ La línea del codificador es 1000, pa8 El valor predeterminado es 4 veces mayor que el codificador Línea | |
Pa9 | Límite de error de posición | ★ En los modos de circuito cerrado y punto, si Error de posición superior al valor establecido Valor, el conductor entrará en posición Alerta de error. | 40 ~ 65535 |
Pa10 | Corriente de retención | ★ Corriente de retención = valor establecido Valor * 100 ma | 0 ~ 80 |
Pa11 | Corriente de circuito cerrado | ★ Corriente de circuito cerrado = valor establecido Valor * 100 ma | 1 ~ 80 |
Pa12 | Selección del tipo de motor | No hace falta. Selección | |
Página 13 | Tiempo de filtrado | Tiempo de filtrado = valor establecido * 66,7 μs | 0-1500 |
Pa14 | Habilitar nivel | ★ 0: entrada de optocoupler Transistor apagado, motor apagado Habilitar; Tiempo de acoplamiento óptico de entrada Transistor on, motor on Gratis. ★ Al introducir optocoupler Transistor on, motor on Habilitar; Tiempo de acoplamiento óptico de entrada El Transistor está apagado y el motor está libre. | 0 ~ 1 |
Página 15 | Nivel de alerta | ★ 0: salida optocoupler en alarma Transistor on; ¿Cuándo? Funcionamiento normal, optocoupler de salida Transistor apagado (apagado) ★ Salida optocoupler en alarma Transistor apagado (apagado); ¿Cuándo? | 0 ~ 1 |
Funcionamiento normal, optocoupler de salida Transistor encendido (conductor) | |||
Página 16 | Selección del modo de pulso | ★ 0: modo pulso / Dirección ★ Modo en sentido contrario a las agujas del reloj | 0 ~ 1 |
Página 17 | Borde del pulso | ★ 0: normal ★ Invertir el pulso de comando de entrada Polaridad | 0 ~ 1 |
Pa18 | Dirección de rotación del motor | ★ 0: el motor gira en el sentido de las agujas del reloj ★ Rotación en sentido contrario a las agujas del reloj | 0 ~ 1 |
Página 19 | Velocidad de trote | 1 ~ 600 | |
Pa20 | Modo de espera | ★ 0: pend como señal de salida de posición. ★ Pned como señal de salida del freno. | 0 ~ 1 |
Pa21 | Nivel de suspensión | ★ 0: en posición o frenado Bien, el optocoupler de salida es Encendido (conductor); De lo contrario, la salida Transistor optocoupler apagado (apagado) ★ Posición o frenado Bien, el optocoupler de salida es Cortar; De lo contrario, la salida Transistor optocoupler encendido (conducción eléctrica) | 0 ~ 1 |
Pa22 | Aceleración | Unidad: R / S ^ 2 | 1-2000 |
Página 23 | Desaceleración | Unidad: R / S ^ 2 | 1-2000 |
6. Función de alarma
6.1 configuración de la alarma
Código Alm | Definición de alarma | Descripción |
-- | ¿Funciona bien? | |
1 | Sobrecorriente | La corriente del motor es demasiado grande |
2 | Sobretensión | Tensión de alimentación del circuito principal demasiado alta |
3 | Error de desviación de posición | La desviación de posición supera el valor establecido. |
4 | Fallo EEPROM | Fallo EEPROM |
6.2 método de tratamiento de la alarma
Código Alm | Definición de alarma | Justificación | Método de tratamiento |
1 | Sobrecorriente | Conductor u, V, W cortocircuito. | Comprueba el cableado. |
Problemas de puesta a tierra | Revisa el suelo. | ||
Daño al aislamiento del motor | Un nuevo Motor. | ||
El conductor resultó herido. | Un nuevo Conductor. |
2 | Sobretensión | Cuando la energía está encendida, Tensión demasiado alta o demasiado alta Baja. | Comprobar entrada Poder. |
Cableado incorrecto de la resistencia del freno Cuando se desconecta repentinamente El motor está funcionando. | Redirigir. | ||
Resistencia al frenado o El Transistor de freno es Dañado. | Un nuevo Conductor. | ||
3 | Error de desviación de posición | Cuando la fuente de alimentación de control está encendida El tablero está dañado. | Un nuevo Conductor. |
Si el motor u, V, W está mal Error de cableado o codificador Aprieta un poco, el motor se romperá. Ejecutar hacia atrás o no Trabajo, | Redirigir. | ||
Codificador dañado | Un nuevo Conductor. | ||
Valor de desviación de posición El alcance es demasiado pequeño. | Aumento Desviación de posición Rango de valores. | ||
El bucle de posición KP es demasiado bajo. | Aumento Bucle de posición KP Valores. | ||
Par insuficiente. | Reducir la carga o Otro más alto Motor de par. | ||
La frecuencia del pulso de mando es Es demasiado alto. | Disminución Frecuencia. | ||
4 | Fallo EEPROM | Chip o placa de circuito no disponible Dañado. | Un nuevo Conductor. |
Hay interferencia en el proceso Proceso de lectura y lectura Escribe EEPROM. | Restaurar valores predeterminados Parámetros. |
7. Pantalla y panel
El panel está compuesto por 6 PANTALLAS LED y 5 botones
Incluir ←、↑、↓、 S (turno), ENT.
'. ←’: Salir o cancelar
'. ↑’: Añadir o siguiente
'. ↓’: Disminución o anterior
"S": número desplazado a la izquierda

Introducir o confirmar
7.1 visualización del menú principal
Seleccione el modo de operación del menú principal. Hay cuatro modos de operación: modo de monitoreo, configuración de parámetros, gestión de parámetros y modo de punto. Pulse el botón ↑ Y ↓ Para cambiar el modo, pulse la tecla ENT para entrar en el submenú y pulse la tecla ENT ← Vuelva al menú principal.

7.2 visualización del submenú
7.2.1 modo de supervisión
Seleccione "DP -" en el menú principal y pulse la tecla ENT para entrar en el modo de monitoreo. Hay 8 Estados de visualización, pulse el botón ↑ Y ↓ Para seleccionar el Estado, pulse el botón ENT para mostrar el valor exacto.

7.2.2 configuración de parámetros
Seleccione "pa -" en el menú principal y pulse la tecla ENT para entrar en el modo de configuración de parámetros. Pa01 a pa23 hay 23 códigos de parámetros, pulse el botón ↑ Y ↓ Para seleccionar el Código del parámetro, pulse el botón ENT para mostrar el valor del parámetro. Pulse el botón ↑ Y ↓ Puede modificar el valor. El botón s deja un número y luego presiona el botón ↑ Y ↓ Aumentar o disminuir el número de destellos. Pulse el botón ENT para confirmar la modificación. Si no se cumplen los valores modificados, no pulse el botón ENT, sino el botón ENT ← Volver al valor original.

7.2.3 gestión de parámetros
La gestión de parámetros se ocupa principalmente de las operaciones entre la configuración de parámetros y la EEPROM. Seleccione "EE -" del menú principal y pulse la tecla ENT para entrar en el modo de gestión de parámetros. Hay tres modos: ee set, EE RD y EE Def.
Ee set: "Parameter write" significa escribir un parámetro en el área EEPROM. Si el usuario modifica sólo los parámetros en lugar de escribir en el área EEPROM, los parámetros modificados no se almacenarán y el valor original se restaurará la próxima vez que se encienda. Sin embargo, si el parámetro está escrito en el área eerpom, será el valor modificado la próxima vez que esté encendido.
Ee RD: "Parameter Reading", se refiere a la lectura de parámetros en el área EEPROM al área Ram. Este proceso se llevará a cabo después de la electrificación. Al principio, los valores de los parámetros en el espacio Ram son los mismos que en el área EEPROM. Pero cuando un usuario cambia un parámetro, cambia el valor del parámetro espacio Ram. Si el usuario no está satisfecho con el valor modificado o el valor del parámetro está perturbado, la operación de lectura del parámetro puede leer el parámetro en el área EEPROM de nuevo en el espacio Ram.
Ee Def: "reinicio de fábrica" significa restaurar los valores predeterminados al espacio Ram y escribir en el área EEPROM. Esta operación se puede utilizar cuando el usuario interfiere con los parámetros y no funciona correctamente.
Tomemos como ejemplo el conjunto EE: Seleccione el modo EE set, pulse el botón entrar y mantenga durante 3 segundos, la pantalla muestra "inicio", lo que significa que los parámetros están siendo escritos en el EEPROM, 1 - 2 segundos después, si la operación EE set tiene éxito, la pantalla mostrará "hecho", Si la operación falla, la pantalla mostrará "error". Pulse el botón ← Puede volver al menú principal.

7.2.4 modo de movimiento puntual
Modo de punto: establecer pa1 = 2, modo de control en modo de punto. Pulse pa19 para establecer la velocidad de trote,La aceleración y desaceleración del trote se establecen a través de pa22 y pa23. Elija correrModo en el menú principal. Pulse el botón ↑ Mantenga, el motor funcionará a velocidad de punto, suelteBotón ↑, El motor se detendrá y mantendrá la velocidad cero. Pulse el botón ↓ Espera, motor.Se ejecutará al revés. Botón de Liberación ↓ , El motor se detendrá y mantendrá la velocidad cero.
Sitio web
Productos
Contáctenos.
Teléfono móvil